


Космическая робототехника платформа Astrobee переходит под коммерческое управление и возобновит работу на Международной космической станции в начале 2026 года. Автономная робототехническая система НАСА, разработанная для помощи астронавтам, открывает новую эру доступа к космическим технологиям для университетов и частных компаний по всему миру.
Автономная робототехника: новый этап развития МКС
Роботизированная платформа Astrobee представляет собой три кубических автономных робота размером 31,75 сантиметра, получивших имена Bumble, Honey и Queen. Космическая робототехника этого типа использует электрические вентиляторы для свободного перемещения в условиях микрогравитации внутри МКС.

Система космической робототехники оснащена камерами, вычислительными процессорами и сенсорами для автономной навигации. Каждый робот может работать независимо или под дистанционным управлением астронавтов, операторов полетов или наземных исследователей. Автономная робототехническая платформа способна выполнять инвентаризацию, документировать эксперименты с помощью встроенных камер и перемещать грузы по станции.
Роботы оснащены трехстепенной механической рукой для захвата поручней станции, что позволяет экономить энергию и манипулировать предметами. Автономная робототехника Astrobee также использует визуально-инерционную навигацию, объединяя данные камер с датчиками движения для точного позиционирования.
Коммерциализация космических технологий через Arkisys
Компания Arkisys, основанная профессором Университета Южной Калифорнии Дэвидом Барнхартом, получила статус официального управляющего и обслуживающей организации платформы Astrobee. Космическая робототехника платформа возобновит операции в начале 2026 года под руководством этой космической логистической компании.
Arkisys разрабатывает трехуровневую модель обслуживания для расширения доступа к космической робототехнике: эксперименты с использованием только программного обеспечения, комбинация программного обеспечения с существующими аппаратными модулями на МКС, и в перспективе — запуск нового оборудования. Компания работает через Национальную лабораторию МКС для облегчения партнерств с международными космическими агентствами и коммерческими пользователями.
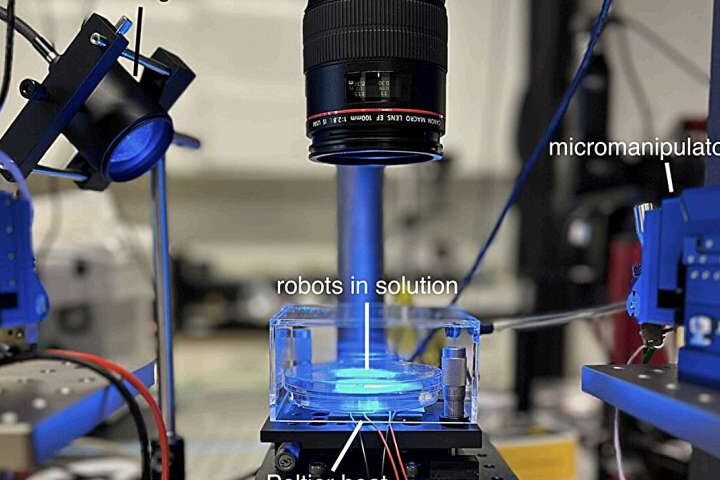
Для наземного тестирования космической робототехники будут доступны объекты в Исследовательском центре НАСА Эймса, Университете Южной Калифорнии и собственном комплексе Arkisys в Лос-Аламитосе, Калифорния. Arkisys уже имеет опыт космических технологий — компания разрабатывает орбитальную платформу «The Port» для размещения полезных нагрузок, сборки и снабжения на орбите.
Автономная робототехника как испытательная площадка инноваций
Платформа Astrobee используется для тестирования автономной навигации, компьютерного зрения, программирования для школьников и коммерческих сервисных технологий в условиях невесомости. Космическая робототехника выступает базой для быстрого экспериментирования в реальных условиях космоса.
Среди текущих проектов на платформе — инициатива Zero Robotics, позволяющая школьникам и студентам писать программный код, который реально исполняется на МКС. Автономная робототехническая система также тестирует AstroSee — систему компьютерного зрения реального времени для автономной стыковки космических аппаратов, разработанную компанией Obruta Space Solutions.
Проект REACCH от Kall Morris Inc. исследует использование щупалец-манипуляторов для захвата космического мусора и обслуживания спутников. Аспирант Университета Южной Калифорнии Джаксон Хилл представил разработку CLINGERS — прототип универсальной стыковочной системы для малых кооперативных космических аппаратов.
Значение для космических исследований и экономики
«Astrobee дает редкую возможность тестировать автономную робототехнику в настоящей среде микрогравитации», — отмечает Дэвид Барнхарт, директор Центра космических инженерных исследований USC. — «Это летающий робот на космической станции, что делает его невероятно редким и ценным для университетов и компаний по всему миру».
Космическая робототехника платформы Astrobee первоначально создавалась для замены системы SPHERES, которая уже работала на МКС. Первая стыковочная станция запущена в ноябре 2018 года на корабле Cygnus NG-10, роботы Bumble и Honey прибыли в апреле 2019 года на NG-11, а третий робот Queen — в июле 2019 года на SpX-18.
Автономная робототехническая платформа помогает астронавтам сократить время на рутинные операции и сосредоточиться на задачах, требующих человеческого участия. Расширение коммерческого использования космической робототехники открывает новые возможности для инноваций и исследований на орбите.
Вам также может быть интересно:
- Amazon представила в 2025 году масштабное внедрение роботов на складах: автоматизация логистики
- Figure 03 в 2025 году: гуманоидный робот третьего поколения попал в список лучших изобретений TIME
- Автоматизация сельского хозяйства: роботы меняют отрасль


Комментарии к статье